Moin Reinder,
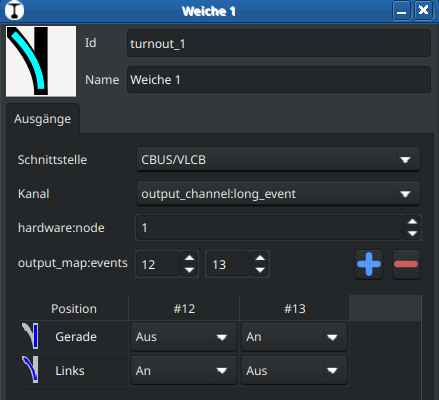
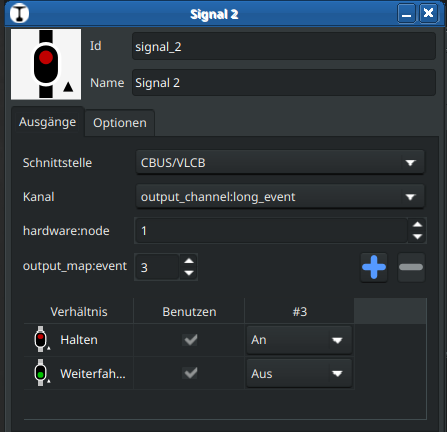
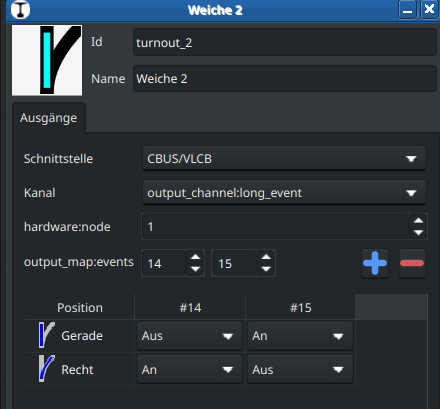
the sensors are now ok. I see no error with the 8 Inputs and 8 Outputs now. Great! What do you think about a list of events of the node, in the setup procedure of the board? I.e. I click a signal/point/sensor, set the node and there is a button to read all events from node, than a click on the event in the list to choose it for the signal/point/sensor? Not yet, but for the future 
I like doxygen and latex I know mkdocs, but never do something with it. It’s a litte bit as DokuWiki, which I use for my site. Markup like markdown, no database, only textfiles.
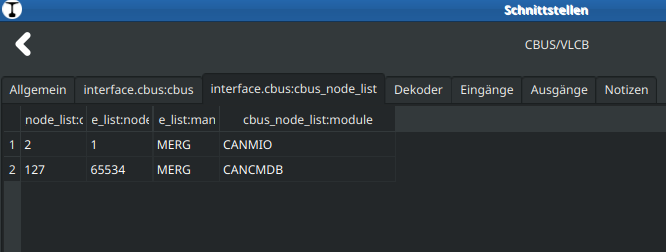
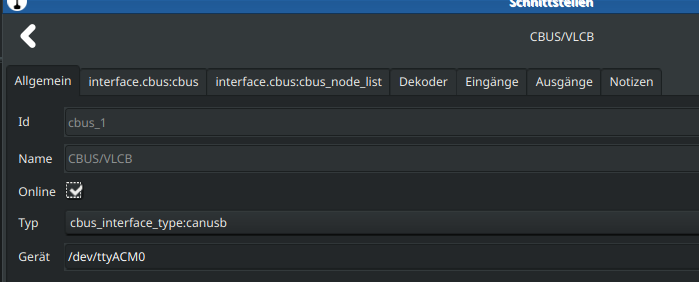
Apropos: This is the start page for CBUS/VLCB on my website. Traintastic is also there I will add all feature things on my site, boards, layouts, software and I have also a Gitea repo.
If I start with lua scripting, I will document it, so that we could made also a fine lua manual. Further I will have a look at mkdocs, to translate the manual into German. If I have the time I could add a section for CBUS/VLCB - but I have no other command station, only the old Roco Multimaus with the Booster without com interface, so I can only write about CBUS.
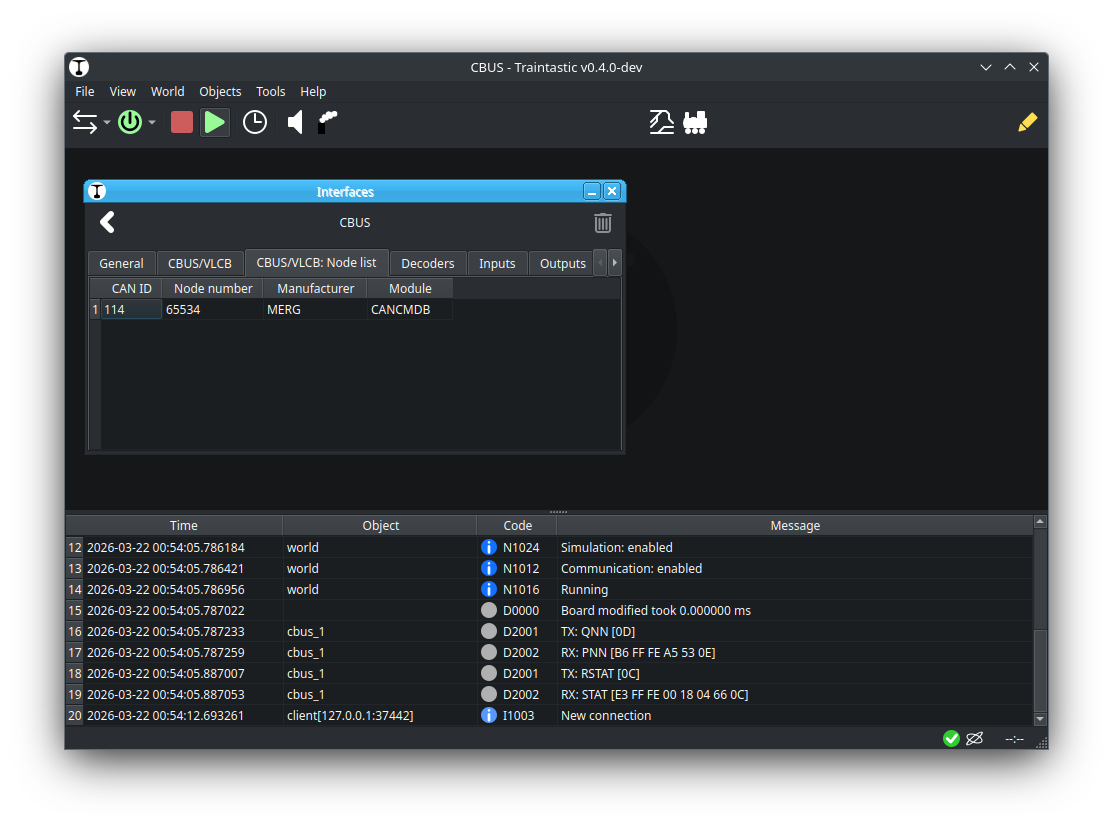
Okay, during I write this I test the DKEEP from CANCAB2, every 4 seconds:
2026-03-16 22:52:23.469666 cbus_1 D2002: RX: DKEEP session=1 [23 01]
2026-03-16 22:52:27.663342 cbus_1 D2002: RX: DKEEP session=1 [23 01]
2026-03-16 22:52:31.857066 cbus_1 D2002: RX: DKEEP session=1 [23 01]
2026-03-16 22:52:36.050723 cbus_1 D2002: RX: DKEEP session=1 [23 01]
2026-03-16 22:52:40.244427 cbus_1 D2002: RX: DKEEP session=1 [23 01]
2026-03-16 22:52:44.438147 cbus_1 D2002: RX: DKEEP session=1 [23 01]
2026-03-16 22:52:48.631705 cbus_1 D2002: RX: DKEEP session=1 [23 01]
Traintastic sends also a DKEEP:
2026-03-16 22:58:19.894408 cbus_1 D2001: TX: DSPD session=1 speed=58 direction=fwd [47 01 BA]
2026-03-16 22:58:20.094540 cbus_1 D2001: TX: DSPD session=1 speed=59 direction=fwd [47 01 BB]
2026-03-16 22:58:24.094631 cbus_1 D2001: TX: DKEEP session=1 [23 01]
2026-03-16 22:58:28.094702 cbus_1 D2001: TX: DKEEP session=1 [23 01]
2026-03-16 22:58:32.094788 cbus_1 D2001: TX: DKEEP session=1 [23 01]
2026-03-16 22:58:32.457973 cbus_1 D2001: TX: DSPD session=1 speed=58 direction=fwd [47 01 BA]
2026-03-16 22:58:32.958406 cbus_1 D2001: TX: DSPD session=1 speed=57 direction=fwd
Also after stop the loco but every second:
2026-03-16 22:58:56.774789 cbus_1 D2001: TX: DSPD session=1 speed=2 direction=fwd [47 01 82]
2026-03-16 22:58:57.275227 cbus_1 D2001: TX: DSPD session=1 speed=0 direction=fwd [47 01 80]
2026-03-16 22:59:01.275247 cbus_1 D2001: TX: DKEEP session=1 [23 01]
2026-03-16 22:59:05.275292 cbus_1 D2001: TX: DKEEP session=1 [23 01]
2026-03-16 22:59:09.275379 cbus_1 D2001: TX: DKEEP session=1 [23 01]
2026-03-16 22:59:13.275463 cbus_1 D2001: TX: DKEEP session=1 [23 01]
After the loco is released in Traintastic, CANCAB2 still says that the loco is in use, when I choose it.
2026-03-16 23:03:53.400197 client_throttle_1 I3002: Throttle client_throttle_1 released train Güterzug
2026-03-16 23:03:53.400304 cbus_1 D2001: TX: GLOC short_address=3 mode=steal [61 00 03 01]
2026-03-16 23:03:53.403120 cbus_1 D2002: RX: ERR error=SessionCancelled session=1 [63 01 00 08]
2026-03-16 23:03:53.404422 cbus_1 D2002: RX: PLOC session=1 short_address=3 speed=13 direction=rev f0=false f1=false f2=false f3=false f4=false f5=false f6=false f7=false f8=false f9=false f10=false f11=false f12=false [E1 01 00 03 0D 00 00 00]
2026-03-16 23:03:53.404445 cbus_1 D2001: TX: STMOD session=1 speed_mode=128 service_mode=false sound_control_mode=false [44 01 00]
2026-03-16 23:03:53.404453 cbus_1 D2001: TX: DSPD session=1 speed=1 direction=rev [47 01 01]
2026-03-16 23:03:57.404525 cbus_1 D2001: TX: DKEEP session=1 [23 01]
2026-03-16 23:04:01.272317 cbus_1 D2002: RX: RLOC short_address=3 [40 00 03]
2026-03-16 23:04:01.273358 cbus_1 D2002: RX: ERR error=LocoAddressTaken short_address=3 [63 00 03 02]
2026-03-16 23:04:01.404586 cbus_1 D2001: TX: DKEEP session=1 [23 01]
This happens also, if I stop the Traintastic server. I have to power of CANCMDB to release the loco for use it again with CANCAB2.
Another idea for the usability:
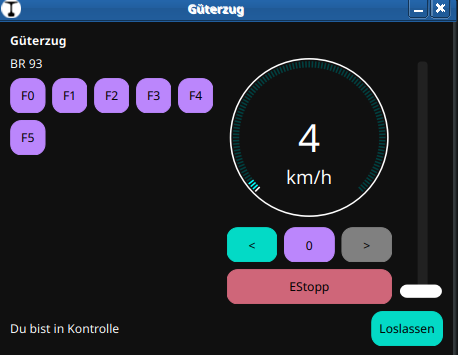
If I want to change the direction, I must always click first on zero. With the CANCAB and also other throttle I could change the direction always. The loco will stop with the decoder parameter for braking, change the direction and speed up also with the decoder parameters (accelerate) to the speed as set at the throttle. Is that possible to change this?
Okay, almost time to sleep 
Greetings, Tom