Moin Reinder,
the problem with the non-existent `<format>` under Debian 12 is annoying. Now I have to modify another file  I’ve now made these changes. You don’t want that in the code, but couldn’t we just implement it in the CBUS branch?
I’ve now made these changes. You don’t want that in the code, but couldn’t we just implement it in the CBUS branch?
CMakeLists.txt:
# Debian 12 has no <format> so switch to fmt
+ include(CheckCXXSourceCompiles)
+ check_cxx_source_compiles("
+ #include <format>
+ int main() { auto s = std::format(\"{}\", 1); }
+ " HAS_STD_FORMAT)
+
+ if(NOT HAS_STD_FORMAT)
+ set(USE_FMT ON)
+ endif()
+
+ if(USE_FMT)
+ find_package(fmt REQUIRED)
+ target_link_libraries(traintastic-server PRIVATE fmt::fmt)
+ target_compile_definitions(traintastic-server PRIVATE USE_FMT)
+ target_link_libraries(traintastic-server-test PRIVATE fmt::fmt)
+ target_compile_definitions(traintastic-server-test PRIVATE USE_FMT)
+ endif()
+ # Debian 12 end
cbusnodelisttablemodel.cpp:
/* Debian 12 has no <format> */
#ifdef USE_FMT
#include <fmt/core.h>
namespace std {
using fmt::format;
}
#else
#include <format>
#endif
cbustostring.cpp
/* Debian 12 has no <format> */
#ifdef USE_FMT
#include <fmt/core.h>
namespace std {
using fmt::format;
}
#else
#include <format>
#endif
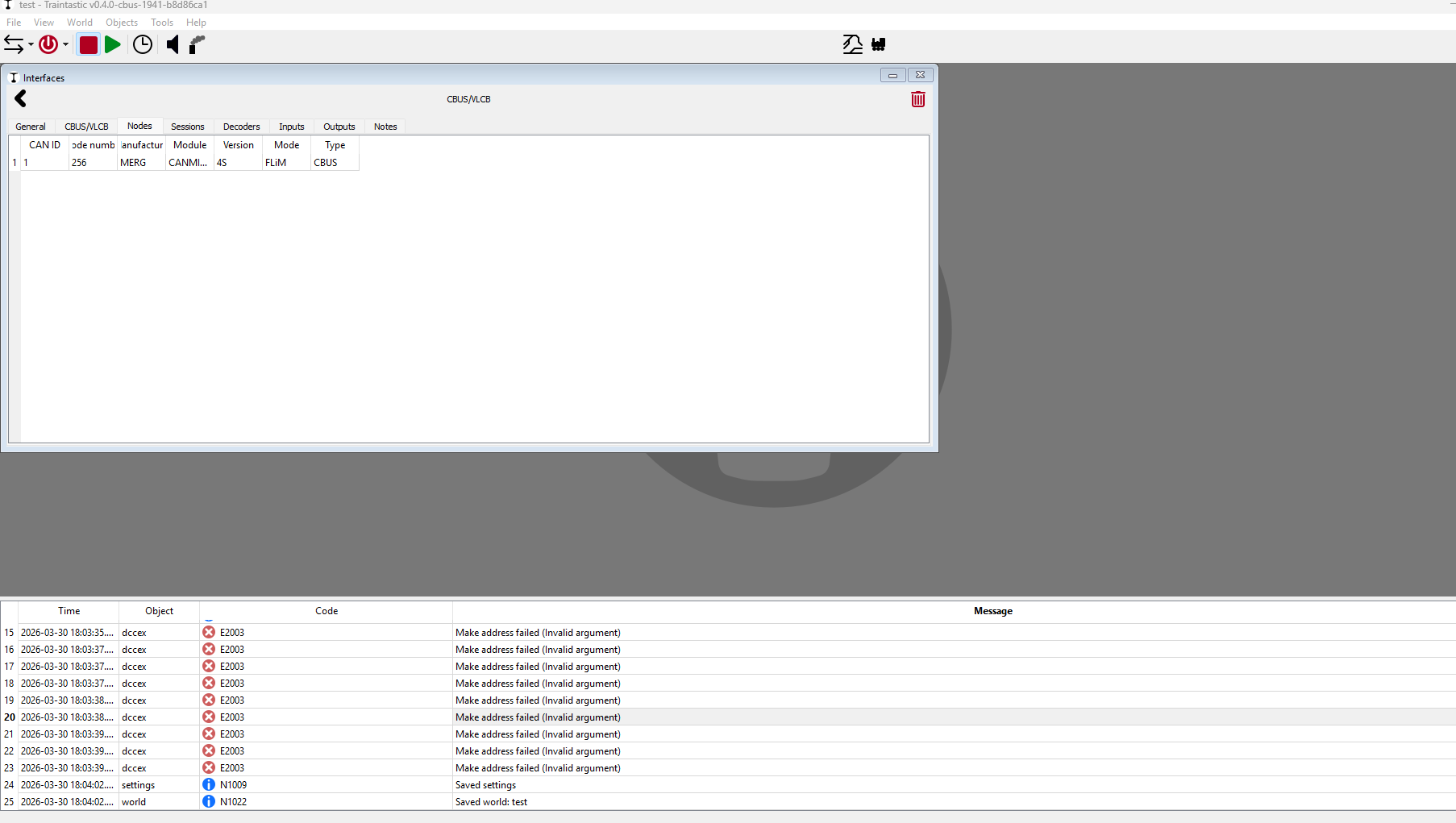
So cmake uses always fmt if format is not present. However, everyone using Debian 12 or a distro like MX Linux based on Debian 12 must have this problem.
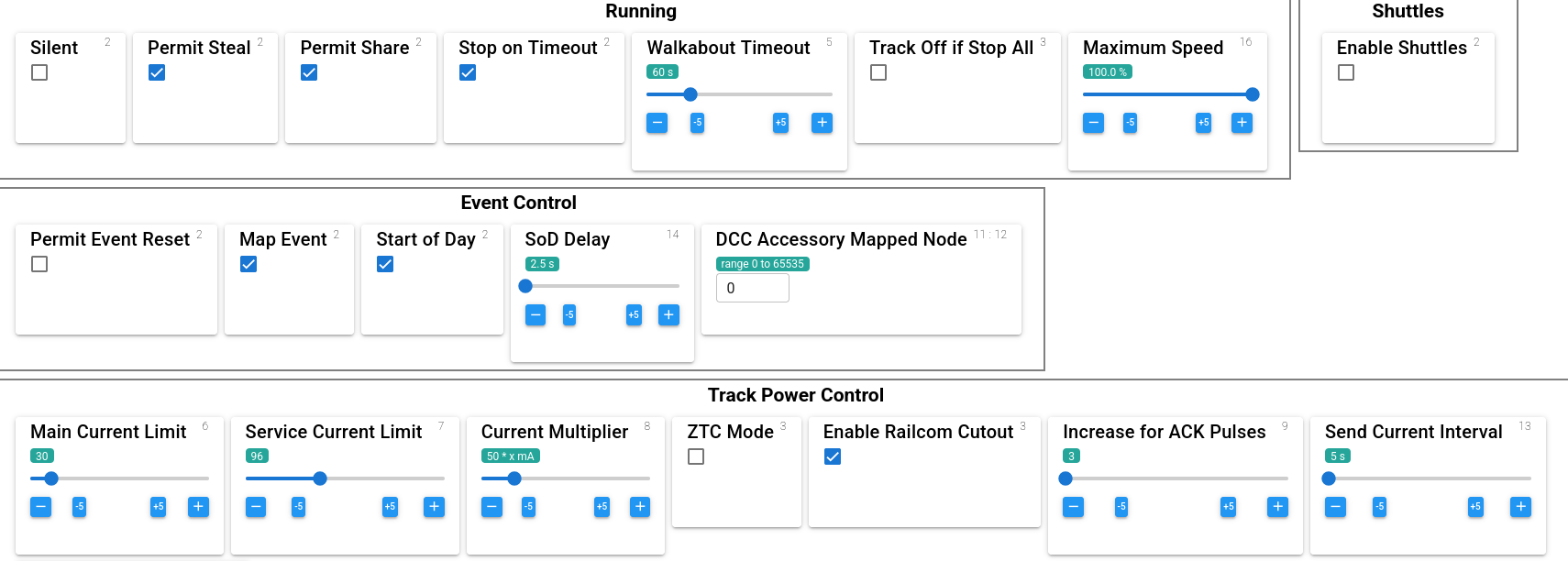
I enabled the CANCMDB to send every 5s the track current.
The current mulitplier is 50.
With JMRI it looks like that:
JMRI < < CBUS | ACON2 NN:65534 EN:1 Data: 0 50 Long Event On Ex2
JMRI < < CBUS | DFUN Session: 1 Range: 1 Fn 18 Set Engine Functions
JMRI < < CBUS | ACON2 NN:65534 EN:1 Data: 0 50 Long Event On Ex2
The message from CANCMDB is a ACON2 with 2 bytes. So I think, the current is 50 x 50 = 250mA. This test I have done with a Roco BR93, ESU LokSound 5. I think the power consumption should be about right. I think the power consumption should be about right; but to really know, I would need to take a resistor and check the current with a multimeter.
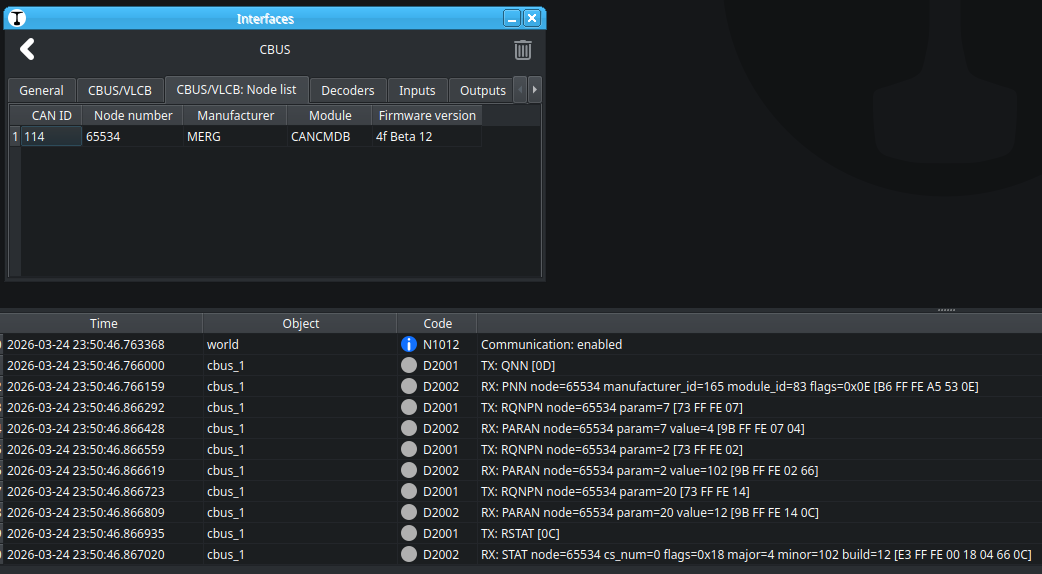
With Traintastic (shorten):
2026-03-25 23:33:16.323752 cbus_1 D2002: RX: DSPD session=1 speed=127 direction=fwd [47 01 FF]
2026-03-25 23:33:16.506005 cbus_1 D2002: RX: DSPD session=1 speed=127 direction=fwd [47 01 FF]
2026-03-25 23:33:16.972127 cbus_1 D2002: RX: [D0 FF FE 00 01 02 26]
2026-03-25 23:33:17.780142 cbus_1 D2002: RX: DSPD session=1 speed=79 direction=fwd [47 01 CF]
2026-03-25 23:33:17.837398 cbus_1 D2002: RX: DSPD session=1 speed=75 direction=fwd [47 01 CB]
2026-03-25 23:33:18.139440 cbus_1 D2002: RX: DKEEP session=1 [23 01]
2026-03-25 23:33:18.977122 cbus_1 D2002: RX: DSPD session=1 speed=21 direction=fwd [47 01 95]
2026-03-25 23:33:19.454272 cbus_1 D2002: RX: DSPD session=1 speed=20 direction=fwd [47 01 94]
2026-03-25 23:33:19.466817 cbus_1 D2002: RX: [D0 FF FE 00 01 00 C8]
2026-03-25 23:33:19.618797 cbus_1 D2002: RX: DSPD session=1 speed=8 direction=fwd [47 01 88]
2026-03-25 23:33:19.683686 cbus_1 D2002: RX: DSPD session=1 speed=4 direction=fwd [47 01 84]
2026-03-25 23:33:19.764674 cbus_1 D2002: RX: DSPD session=1 speed=0 direction=fwd [47 01 80]
2026-03-25 23:33:19.878802 cbus_1 D2002: RX: DSPD session=1 speed=0 direction=fwd [47 01 80]
2026-03-25 23:33:21.961649 cbus_1 D2002: RX: [D0 FF FE 00 01 00 00]
2026-03-25 23:33:22.333192 cbus_1 D2002: RX: DKEEP session=1 [23 01]
2026-03-25 23:33:24.456458 cbus_1 D2002: RX: [D0 FF FE 00 01 00 00]
The last two bytes are the current. I’m not sure how to convert that. Since I only have estimated values for the loco, I’ll probably have to measure it properly with some power resistory, I should have enough here .
Greetings, Tom