Moin Reinder,
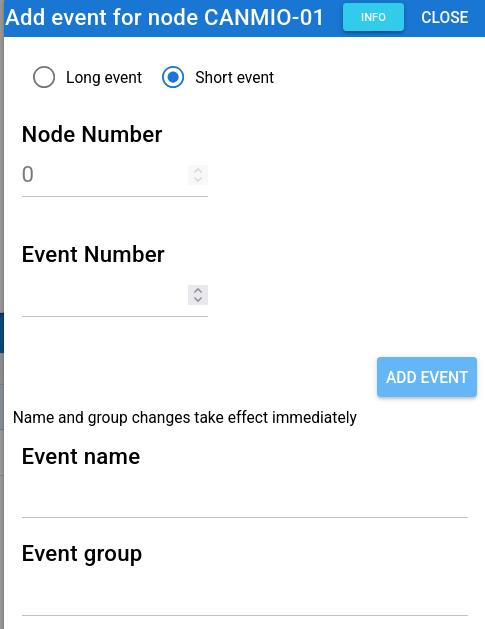
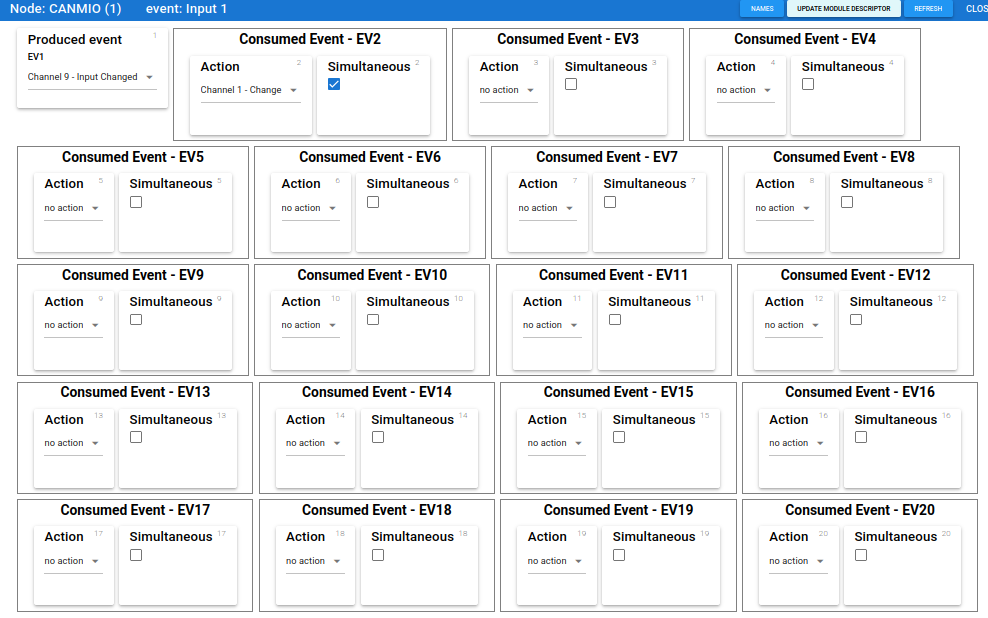
I’ve tested ACON, ASON and ASOF. I have configured the CANVOUT node with MMC and three events.
There are the events 14 and 15 as short events and the event 16 as a long event. Short events don’t use a node number, every node with configured short events reacts on this event. Long events need the node number.
This test was made with DecoderPro (JMRI)
JMRI > > CBUS | ASON EN:15 Short Event On ON event using the event, no node. [+15] Dyn Prio: 2 Min Prio: 3 CAN ID : 126 [5fe] 98 00 00 00 0F RTR:N
JMRI > > CBUS | ASON EN:14 Short Event On ON event using the event, no node. [+14] Dyn Prio: 2 Min Prio: 3 CAN ID : 126 [5fe] 98 00 00 00 0E RTR:N
JMRI > > CBUS | ASOF EN:14 Short Event Off OFF event using the event, no node. [-14] Dyn Prio: 2 Min Prio: 3 CAN ID : 126 [5fe] 99 00 00 00 0E RTR:N
JMRI > > CBUS | ASOF EN:15 Short Event Off OFF event using the event, no node. [-15] Dyn Prio: 2 Min Prio: 3 CAN ID : 126 [5fe] 99 00 00 00 0F RTR:N
This switches Out 7 and Out 8 ON and then Out 7 and Out 8 off, without a node number, only the event is needed. The CAN ID 126 is the ID of DecoderPro.
With the long event I have to add the node number of the node, which should do the event, as you see the node number is 1:
JMRI > > CBUS | ACON NN:1 EN:16 Long Event On ON event using the node and event. [+n1e16] Dyn Prio: 2 Min Prio: 3 CAN ID : 126 [5fe] 90 00 01 00 10 RTR:N
Both options are well running with DecoderPro.
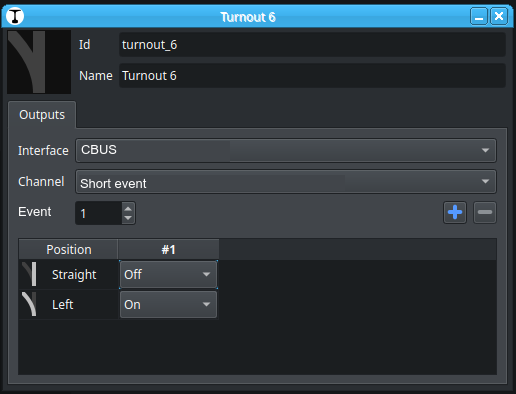
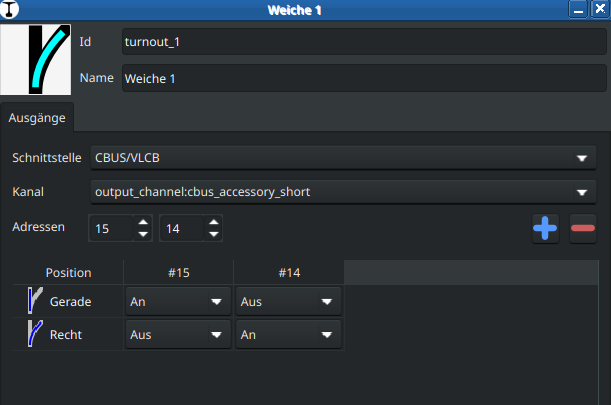
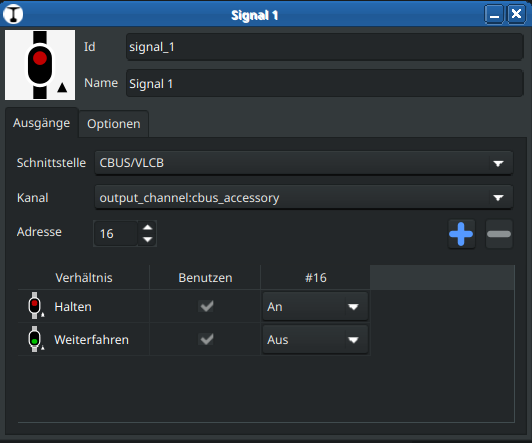
Then I add a point to Traintastic.
This runs also very well and toggles Out 7 and Out 8 with the short events 14 and 15.
026-03-06 22:46:31.487358 cbus_1 D2001: TX: ASOF node=65532 device=15 [99FFFC000F]
2026-03-06 22:46:31.487391 cbus_1 D2001: TX: ASON node=65532 device=14 [98FFFC000E]
2026-03-06 22:46:34.625796 cbus_1 D2001: TX: ASON node=65532 device=15 [98FFFC000F]
2026-03-06 22:46:34.625830 cbus_1 D2001: TX: ASOF node=65532 device=14 [99FFFC000E]
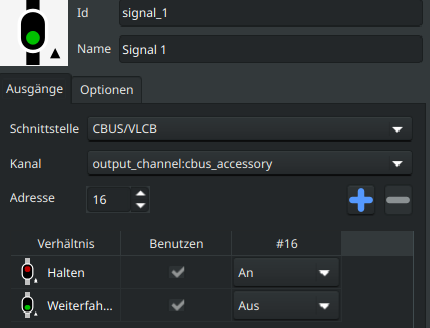
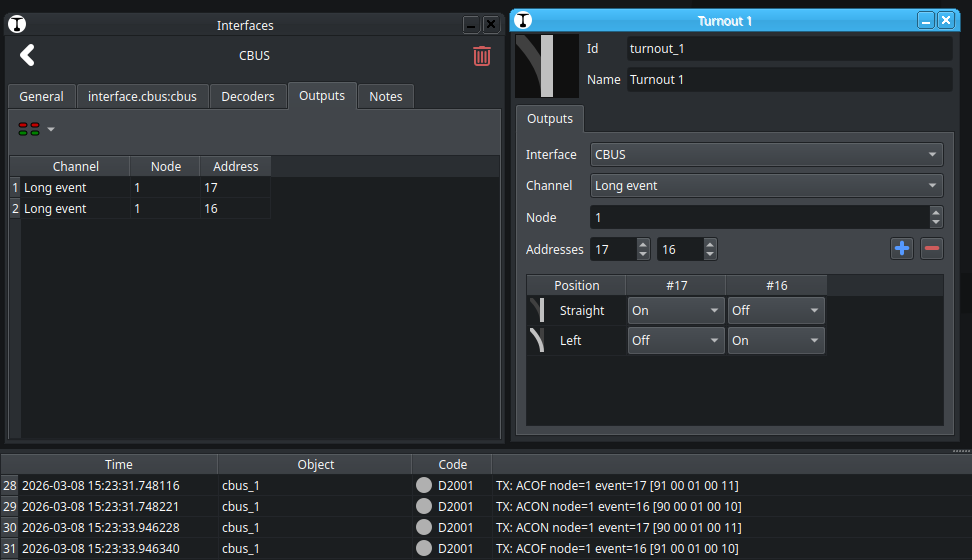
But a problem exists with the long event:
2026-03-06 22:48:03.996735 cbus_1 D2001: TX: ACOF node=65532 event=16 [91FFFC0010]
2026-03-06 22:48:05.549055 cbus_1 D2001: TX: ACON node=65532 event=16 [90FFFC0010]
2026-03-06 22:48:07.191648 cbus_1 D2001: TX: ACOF node=65532 event=16 [91FFFC0010]
Traintastic sends its own node number here, not the number to which the event should be sent.
The definition of short event and long event here by MMC is slightly different from that in the developer’s guide. Short events are based on the P/C model, long events on hardware addressing.
If you switch to short event, the node number is always 0. So traintastic should use with long events the node number as address to which the event should be sent, not the own number.
I am still wondering whether the configuration of the nodes should be implemented in Traintastic or whether it would be better to use MMC for this. This could be quite complex, because various nodes can have completely different settings, including the teach mode. At the moment I think the configuration of the nodes with MMC is ok.
But, it’s very nice that the basics running fine!
Greetings,
Tom