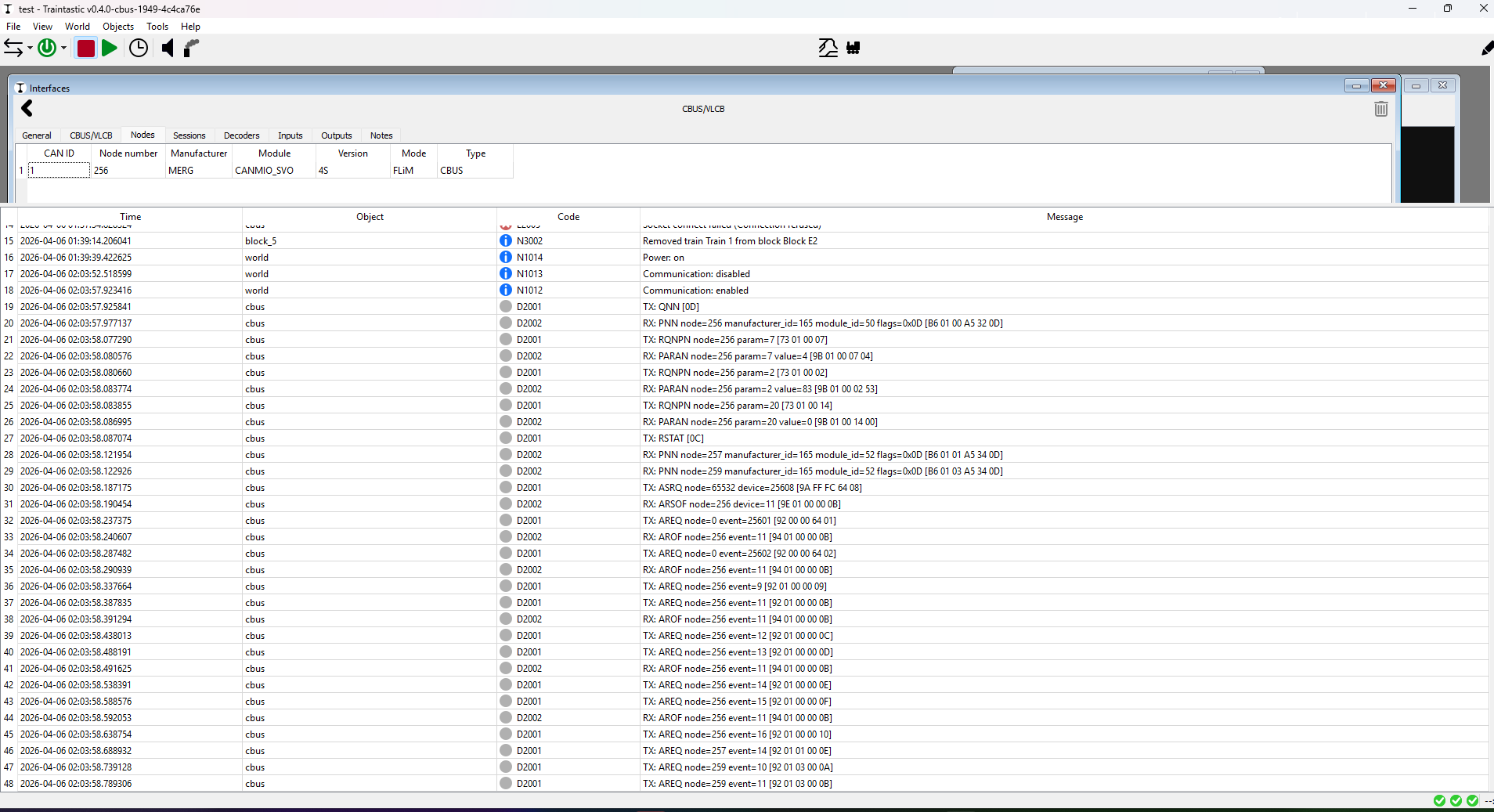
My loco nearly did what this could protect 
Run with a bit too much speed into the wrong track because Traintastic & layout disagreed 
- How does it work on my layout
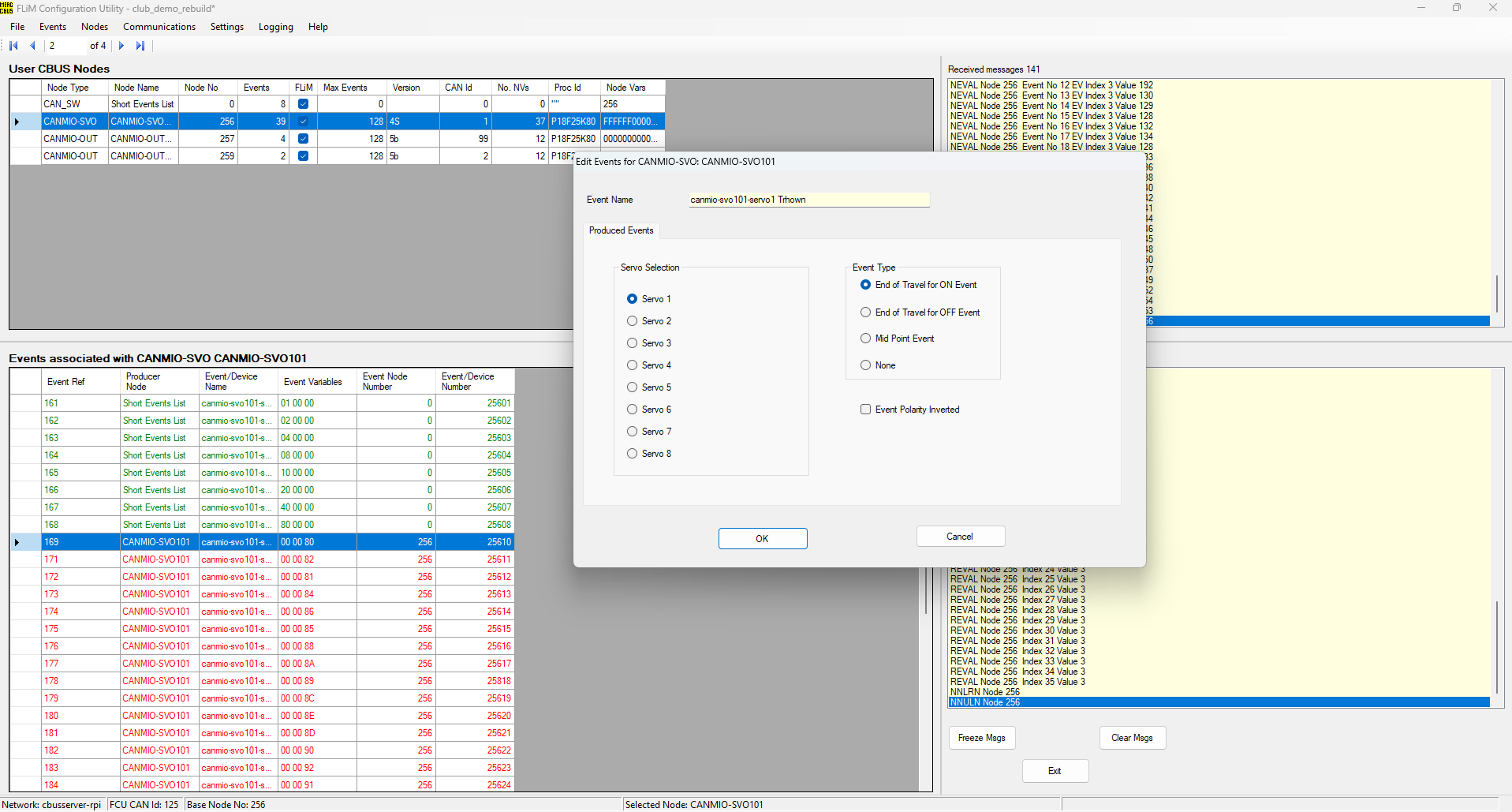
1a) Set up events to throw a turnout [ consumed effectively ]
1b) set up events when turnout state changes.
( default positions available: Thrown / Mid / Closed per servo in this case )
example from my config:
2)How does it work on other CBUS users
It is possible to set up a CANCOMPUTE [ same pic controller ] and embed rules
on what to do on startup / what to do upon receiving a certain event etc.
Other options: forget start of day and write scripts to do actions from your layout software ( ie fire a bunch of commands from a python/jython/lua script )
3)Is there a standardized method on CBUS controlled layouts?
Start of day fires a set servos to thrown example:
- West inner [ wye ]
- West Outer [ wye ]
- East
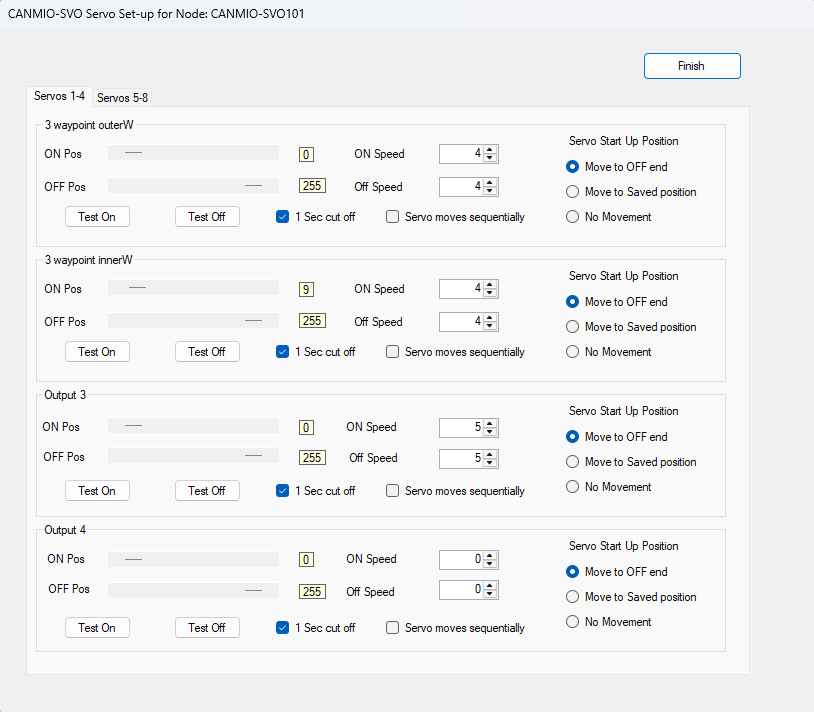
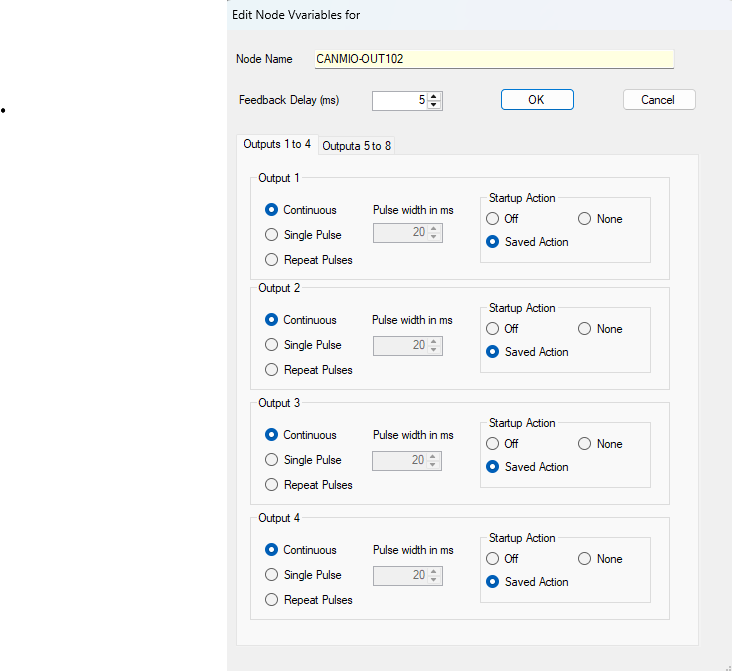
I can not remember this dialog [ my config has been around for a while and FliM config has gone through a couple of updates in the mean time ]
But this might as well be a more dummy-friendly way to set the start of day on a node:
It is part of the standard Config software with a few mouse-clicks
Yes i am a dinosaur, i have FliM and not the NodeJS config software 
Based on the above canmio-out / probably any of the canv series
will more than likely expose the same behavior.
canmio-out can be used as driver for leds relays etc.
canv4bip solenoid driver: appears to have the feature as well.
Any recent board out of the CANV series has a common software ancestry before setting up the “thing” that makes it special
4)How does it work in combination with the start of day event?
Hope the screenshots help a bit.
what it boils down to:
- set your “action” event [ servo | solenoid | tortoise motor | led | whatever ]
- setup events to emit on state change
- set powerup behaviour activate one action from 1)
- write config
- powercycle
upon power-cycle the servo will move to it’s desired position and will emit any changes set up that it encounters.
5)Are there besides start of day other events to take into account?
maybe this: CBUS is basicaly a publish/subscribe bus.
You could have a physical control panel to drive your layout based on CBUS comms. It would be contentious with Traintastic driving the layout but i have seen people drive from a panel with help of jmri.
Supporting this advanced use-case: maybe consider it for the Zimbabwe release :-). Having either sensors on layout objects and/or bring the layout to a known state might be a smart plan
Sidenote:
Hmm You might mimic Start of Day on all busses by walking through all turnouts and issue a set turnout to my last saved state.
If you do that, you can be fairly sure the layout will be in the same state as Traintastic expects it to be.
If you decide this is useful, maybe pace it a little bit for larger layouts since that could in theory cause bus or power issues
( There are some docs out there where power usage on startup can become an issue or where “broadcast storms” overwhelm the system )
Rob from little wicket did an actual example:; in this case with CMRI  and JMRI
and JMRI
Sorry i hate CMRI